SLAM200 Series Long-Range Scanners
The SLAM200 Series is the third generation of high-precision handheld 3D LiDAR scanners developed by Feima Robotics. The platform integrates multi-channel laser sensors, dual 12 MP panoramic cameras, a built-in GNSS module, and an upgraded processing architecture to deliver reliable, high-quality spatial data capture across a wide range of environments.
The series includes three configurations—SLAM200, SLAM200E-32, and SLAM200E-16—providing tiered performance, range, and cost while maintaining a common workflow and software environment.
Typical system packages fall in the $20K to upper $40Ks range, depending on model and included options.
Pricing is provided by quotation. When available, we will connect you with an authorized local dealer in your region for pricing, fulfillment, and support.
Description
SLAM200 Series of Scanners
The SLAM200 Series is a modular family of handheld mobile mapping systems designed for professional reality capture across indoor, outdoor, and mixed environments. Each model is built on a common SLAM-based LiDAR platform, delivering consistent data quality, unified workflows, and scalable performance based on sensor configuration.
System Overview
- Real-time SLAM-based positioning (no control required, optional GNSS integration)
- Unified data capture and processing workflow across all models
- Optimized for rapid field deployment and efficient post-processing
- Supports indoor, outdoor, and transition environments
Model Variants
- SLAM200 — High-performance configuration with extended range and maximum coverage
- SLAM200E-32 — Balanced performance with 32-channel LiDAR for general-purpose mapping
- SLAM200E-16 — Entry-level configuration with 16-channel LiDAR for cost-sensitive deployments
Deployment Flexibility
- Handheld operation for rapid walkthrough capture
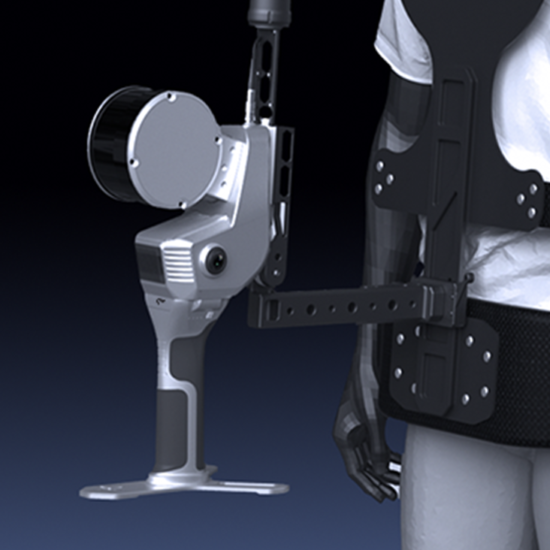
- Backpack and vest-mounted configurations for extended use
- Vehicle-mounted workflows for corridor and roadway mapping
Capture & Imaging
- Panoramic 360° laser scanning coverage for complete scene capture
- Integrated visual camera for contextual mapping and image-supported workflows
- Dedicated texture camera for enhanced point cloud colorization and scene detail
- Optional 360 panoramic camera bracket supports image capture for emerging 3D Gaussian Splatting (3DGS) workflows
Included Software & Workflow
- Includes SLAM GO (mobile) and SLAM GO POST (desktop) software for complete capture-to-processing workflow
- Real-time mapping and trajectory visualization during data capture
- Post-processing for point cloud generation, refinement, and colorization
- Supports coordinate alignment, including GNSS/RTK-assisted workflows
- Point cloud viewing, editing, measurement, and data export
- Standard export deliverable formats LAS, e57 and ply (3DGS) with optional 360 camera adaptor
SLAM200 Specifications
General Specifications
| Weight |
1.4 kg (Scanner)
1.9 kg (With battery handle and base) |
| Dimensions |
404 mm × 138 mm × 170 mm |
| Internal Data Storage |
512 GB SSD |
| Working Temperature |
-20 °C ~ 50 °C |
| Humidity |
< 95% |
| Protection Class |
IP54 |
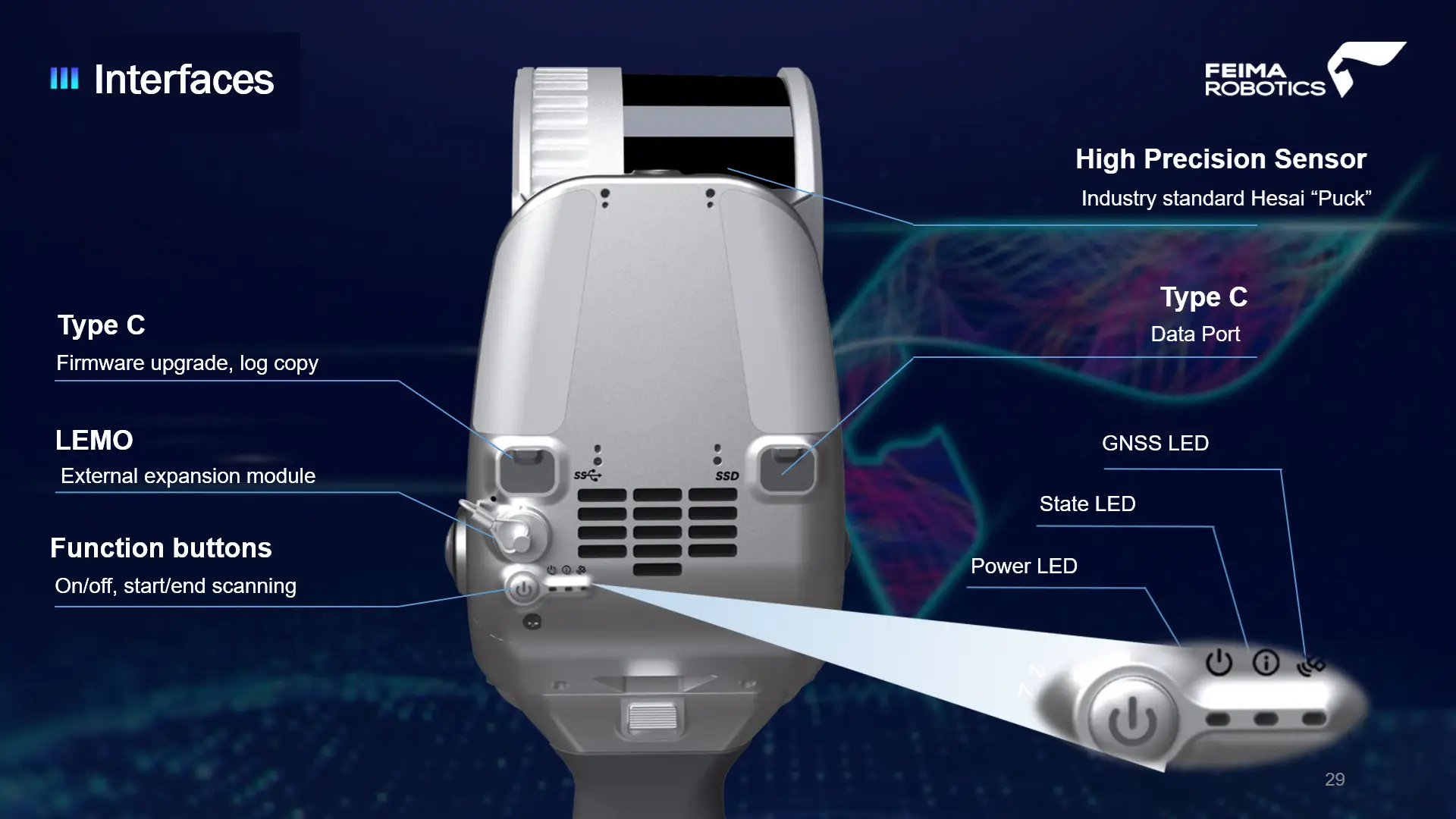
| Communication |
Wi-Fi | Bluetooth | Type-C1: Charge / OTG / 20V external power | Type-C2: SSD |
| Lithium Battery Handle |
SP30 |
| Lithium Battery Weight |
400 g |
| Lithium Battery Endurance |
Approx. 70 mins (Only SLAM200) |
Camera
| Number of Cameras |
2 |
| Effective Pixels |
12 MP (per camera) |
| Resolution |
4000 (H) × 3000 (V) (per camera) |
| FOV |
210° (per camera) |
| Frame Rate |
30 Hz |
Result Accuracy
| Point Cloud Thickness |
2 cm (real-time)
0.5 cm* (after optimization, planar thickness within 50 m of odometry center) |
| Relative Accuracy |
2 cm @ 100 m (real-time RMSE)
1 cm @ 100 m / 5 mm @ 60 m* (post-processing, handheld mode / control point-assisted mode) |
| Absolute Accuracy |
3 cm (real-time RMSE)
2 cm typical* (post-processing RMSE) |
* Optimized results are based on post-processing workflow and may vary depending on environment, trajectory quality, control usage, and processing method.
GNSS Module
| Satellite System |
GPS | GLONASS | Galileo | BDS | QZSS |
| Positioning Accuracy (RTK) |
Horizontal 0.8 cm + 1 ppm
Vertical 1.5 cm + 1 ppm |
Laser
| Laser Class |
Class 1 |
| Range |
0.5 m ~ 300 m |
| FOV |
360° (H), 270° (V) |
| Laser Pulse Repetition Rate |
640 kpts/s |
| Echoes |
3 Returns |
| Rotating Rate |
10 Hz (typical) |
SLAM200E Specifications
General Specifications
| Weight |
1.6 kg (Scanner)
2.1 kg (With battery handle and base) |
| Dimensions |
404 mm × 118 mm × 170 mm |
| Internal Data Storage |
512 GB SSD |
| Working Temperature |
-20 °C ~ 50 °C |
| Humidity |
< 95% |
| Protection Class |
IP54 |
| Communication |
Wi-Fi | Bluetooth | Type-C1: Charge / OTG / 20V external power | Type-C2: SSD |
| Lithium Battery Handle |
SP30 |
| Lithium Battery Weight |
400 g |
| Lithium Battery Endurance |
Approx. 70 mins (Only SLAM200) |
Camera
| Number of Cameras |
2 |
| Effective Pixels |
12 MP (per camera) |
| Resolution |
4000 (H) × 3000 (V) (per camera) |
| FOV |
210° (per camera) |
| Frame Rate |
30 Hz |
Result Accuracy
| Point Cloud Thickness |
2 cm (real-time)
0.5 cm* (after optimization, planar thickness within 50 m of odometry center) |
| Relative Accuracy |
2 cm @ 100 m (real-time RMSE)
1 cm @ 100 m / 5 mm @ 60 m* (post-processing, handheld mode / control point-assisted mode) |
| Absolute Accuracy |
3 cm (real-time RMSE)
2 cm typical* (post-processing RMSE) |
* Optimized results are based on post-processing workflow and may vary depending on environment, trajectory quality, control usage, and processing method.
GNSS Module
| Satellite System |
GPS | GLONASS | Galileo | BDS | QZSS |
| Positioning Accuracy (RTK) |
Horizontal 0.8 cm + 1 ppm
Vertical 1.5 cm + 1 ppm |
Laser
| Laser Class |
Class 1 |
| Range |
0.5 m ~ 300 m |
| FOV |
360° (H), 270° (V) |
| Laser Pulse Repetition Rate |
640 kpts/s |
| Echoes |
Two Returns |
| Rotating Rate |
10 Hz (typical) |
Document Resources - Docs
Data Sheets
A quick comparison of the three SLAM200 models.
The official Feima Robotics SLAM 200 Data Sheet.
The official Feima Robotics SLAM200E16 and 32 Data Sheet.
Scanner Documents
A concise getting-started guide for preparing and operating the SLAM200 in the field.
Detailed reference manual for SLAM200 hardware, operation, setup, and core system functions.
A streamlined guide for initial setup and first-use workflow for SLAM200E scanners.
Detailed reference manual for SLAM200E systems covering features, handling, and operational guidance.
Product Images and Videos

Configuration Info

Scanner Kit

Vehicle Mount on ATV
Configuration Info
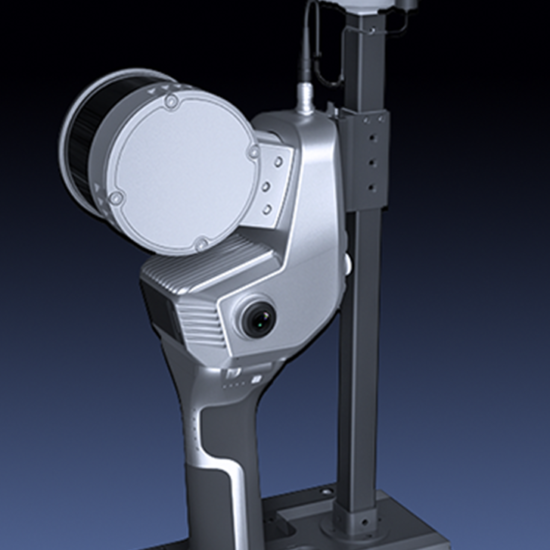
Assembled Scanner

Feima SLAM200 Video

3D Viewer
 Follow SlamScanner on LinkedIn
Follow SlamScanner on LinkedIn